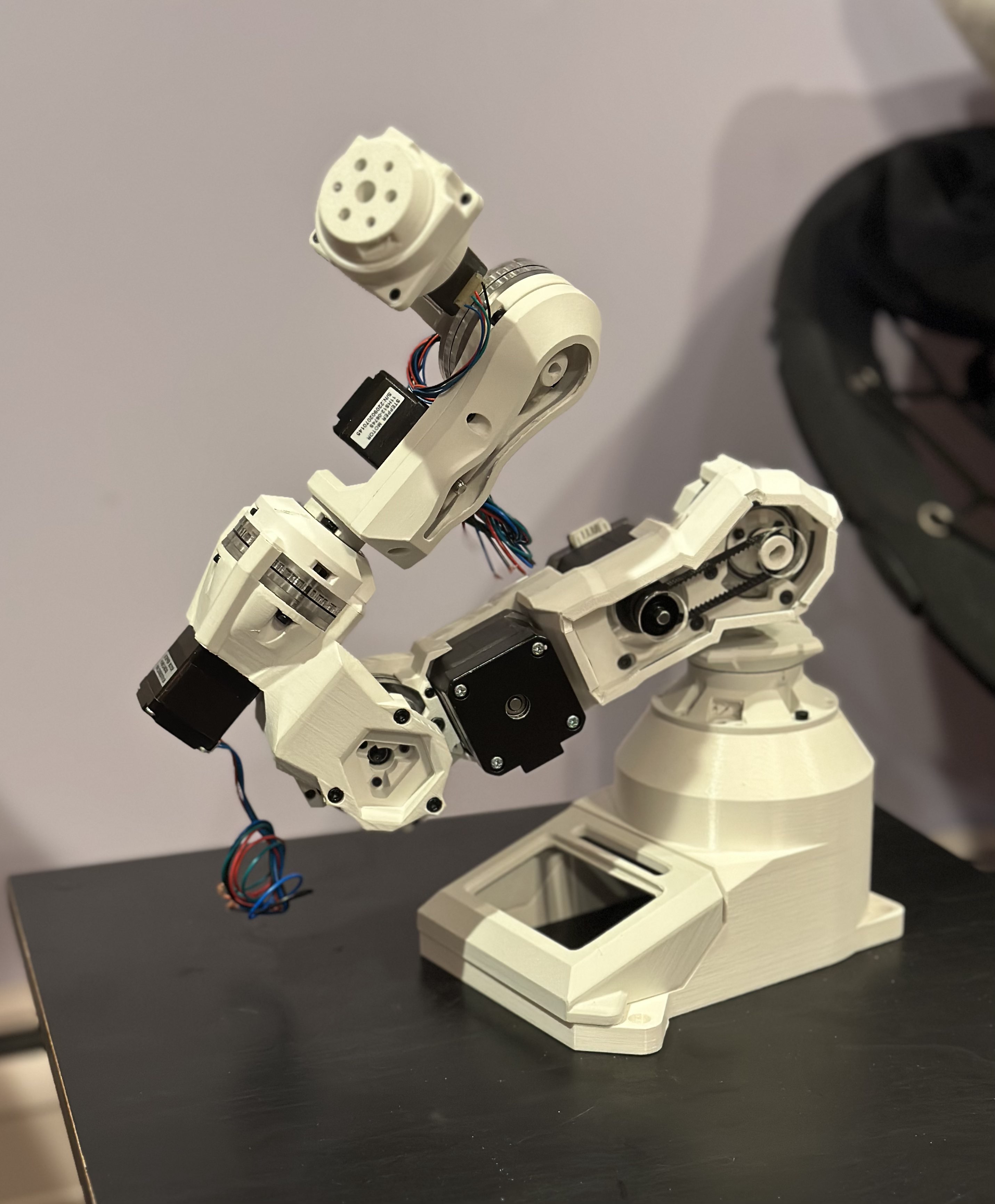
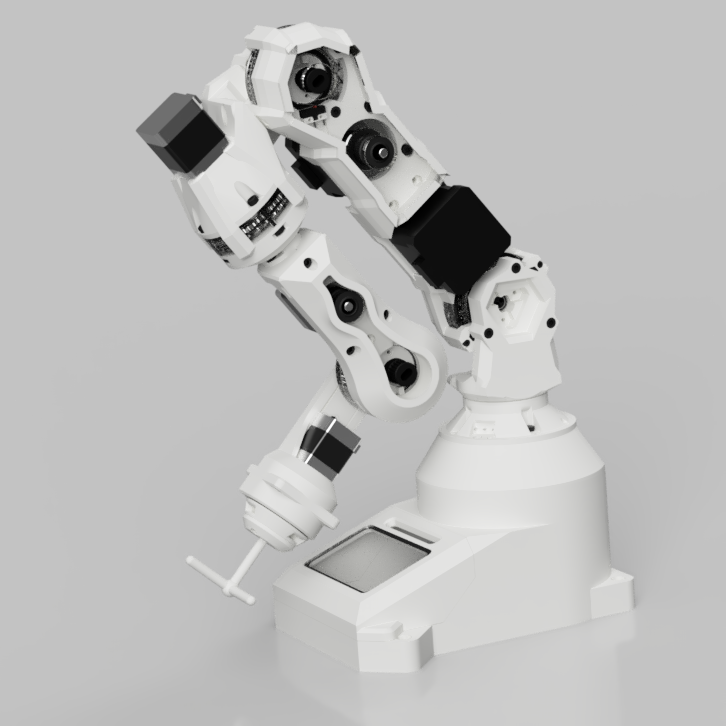
6DOF DESKTOP ARM
We have created an open-source compilation of all of the work done by Sahil & I on this project, and released it here:
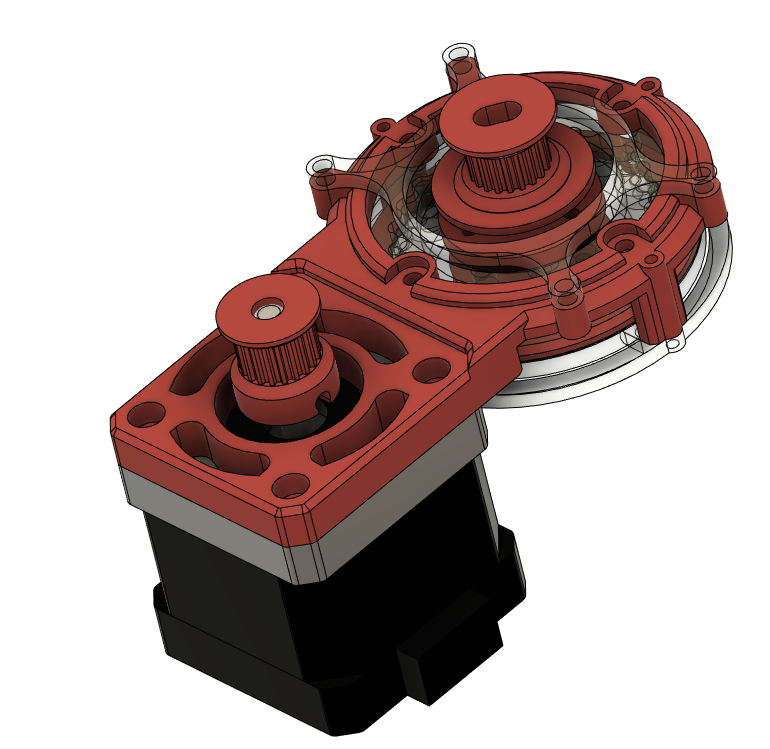
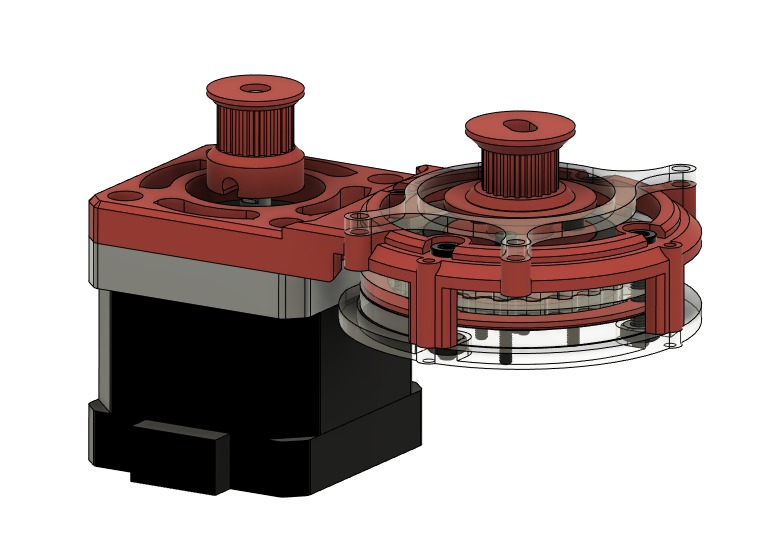
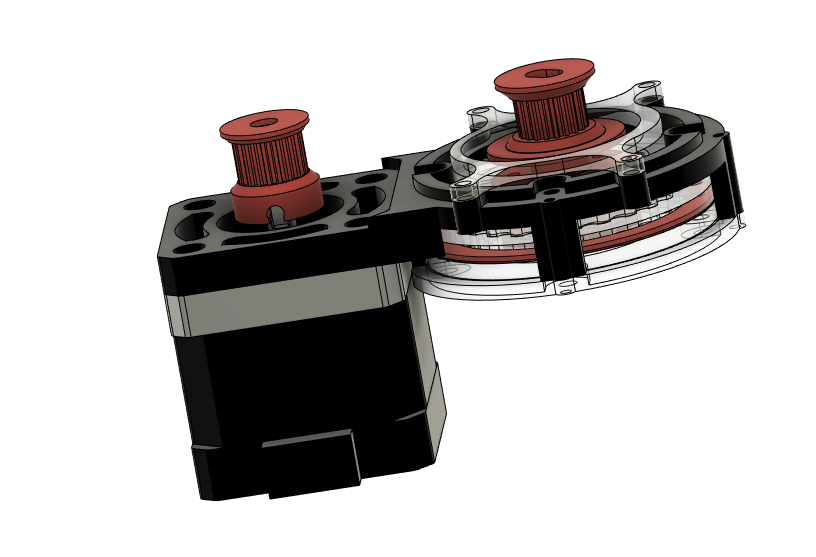
We designed this arm almost completely from scratch - every arm part, linkage, & assembly, the cycloidal actuators and the equations which define their curves, the motor driver circuitry and PCB, the forward kinematics tele-op controllers, and much of the code.
The things we COULDNT do from scratch, like creating an inverse kinematics solver, were still studied and worked on - we either plan to do them in the future, or we have writeups & other tools we made to understand & use them.
We made a framework for creating 6DOF robotic arms - our arms are very different from each other, but they use the same "things".
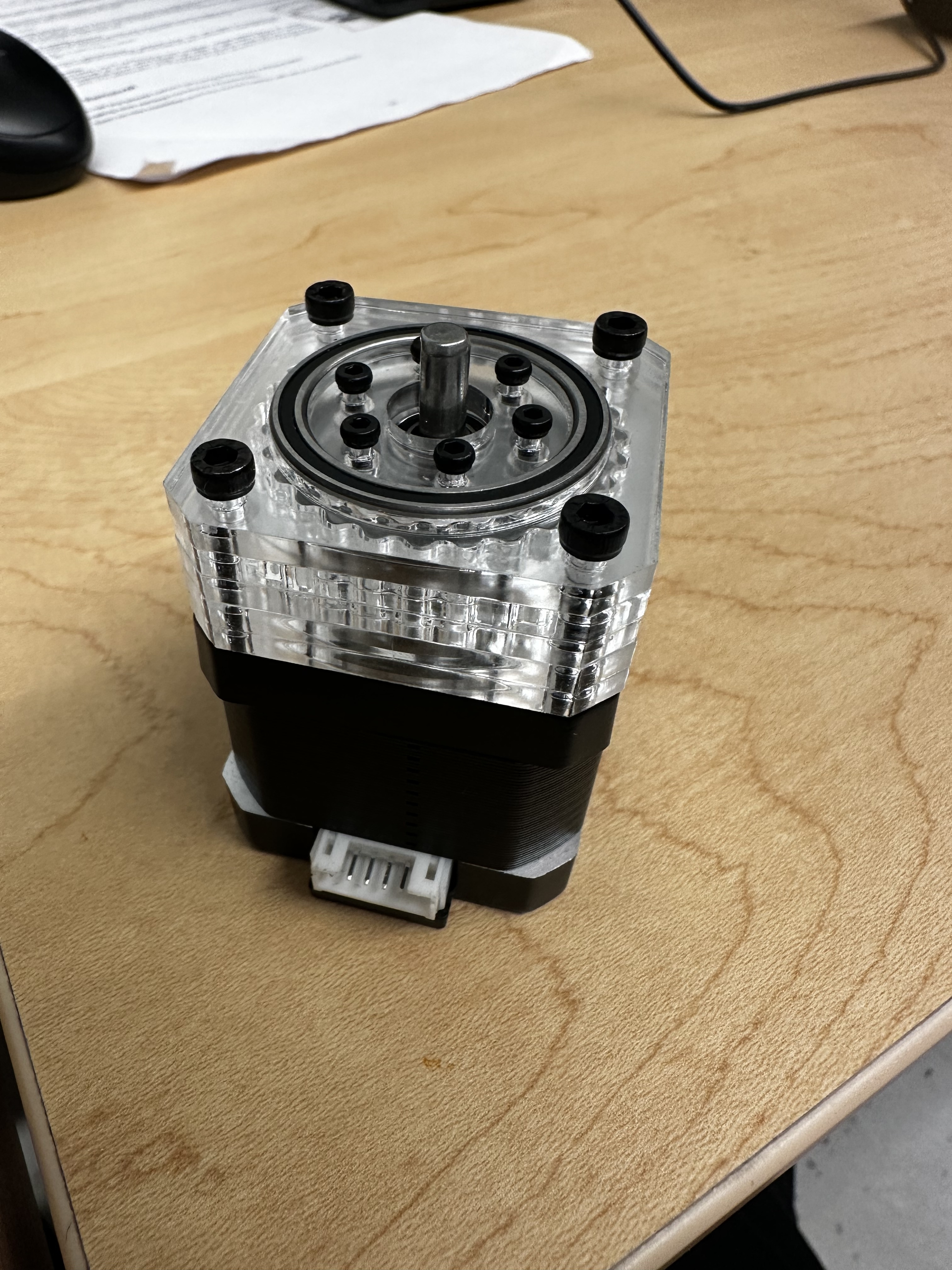
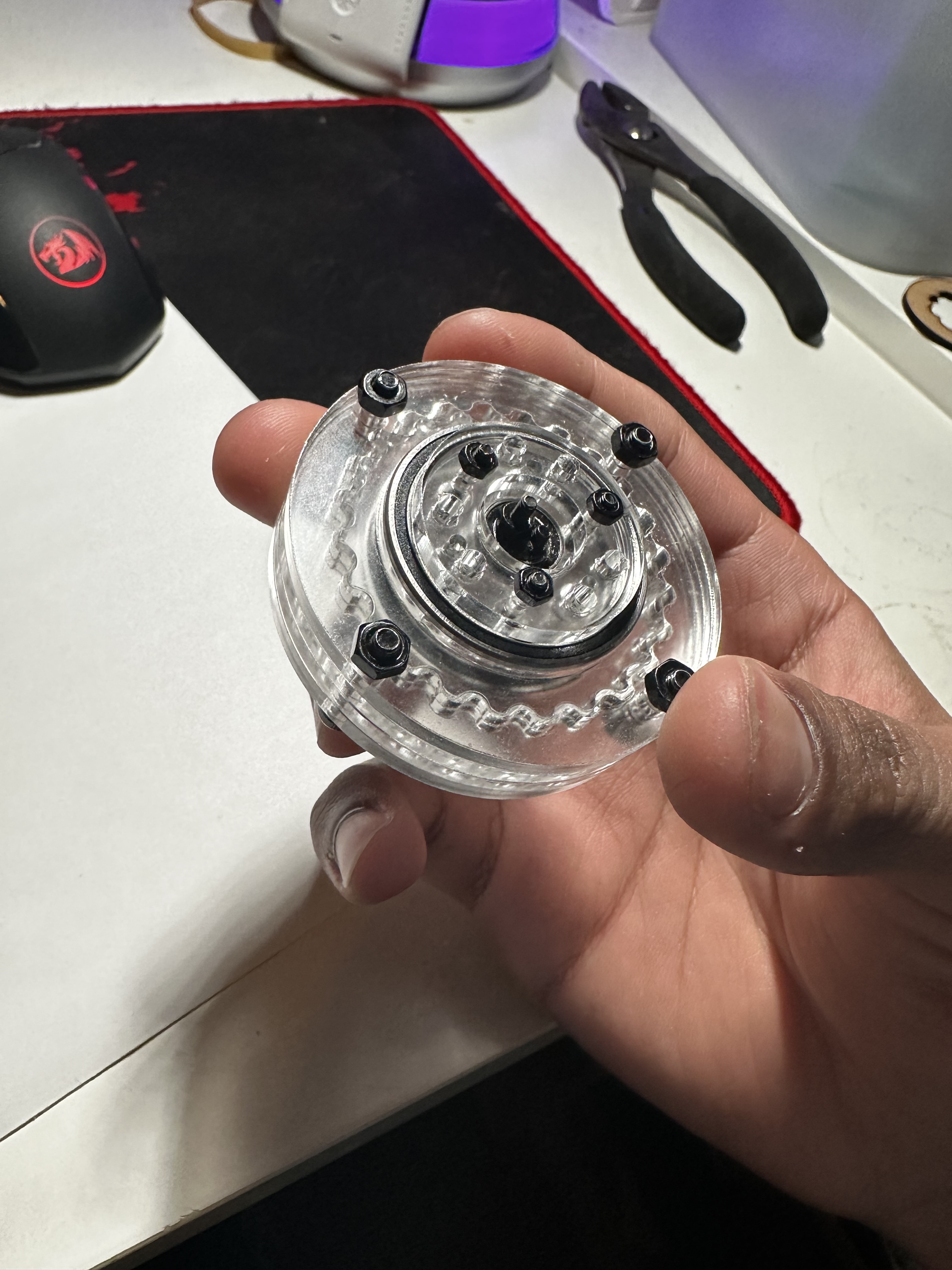
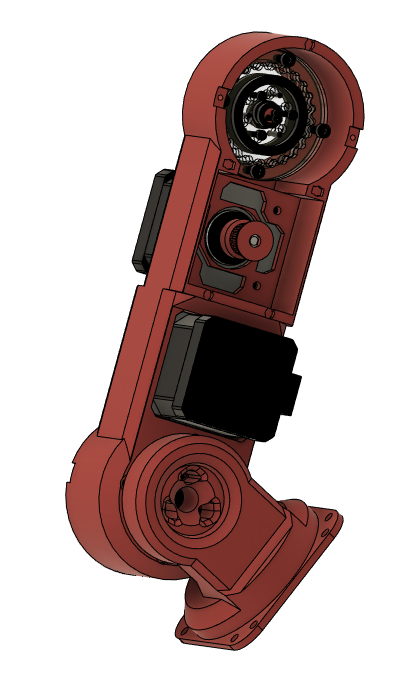
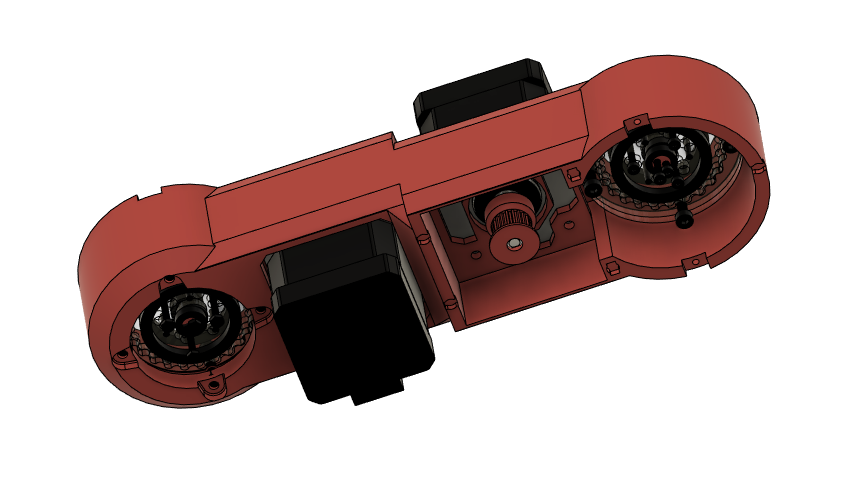
My main contributions towards the project were creating the cycloidal function generator & designing the actuators, creating the mechanics for my arm, and creating the miniature tele-op controller.
We brought the price down to around $300 (and that includes fabrication, electronics, etc.).
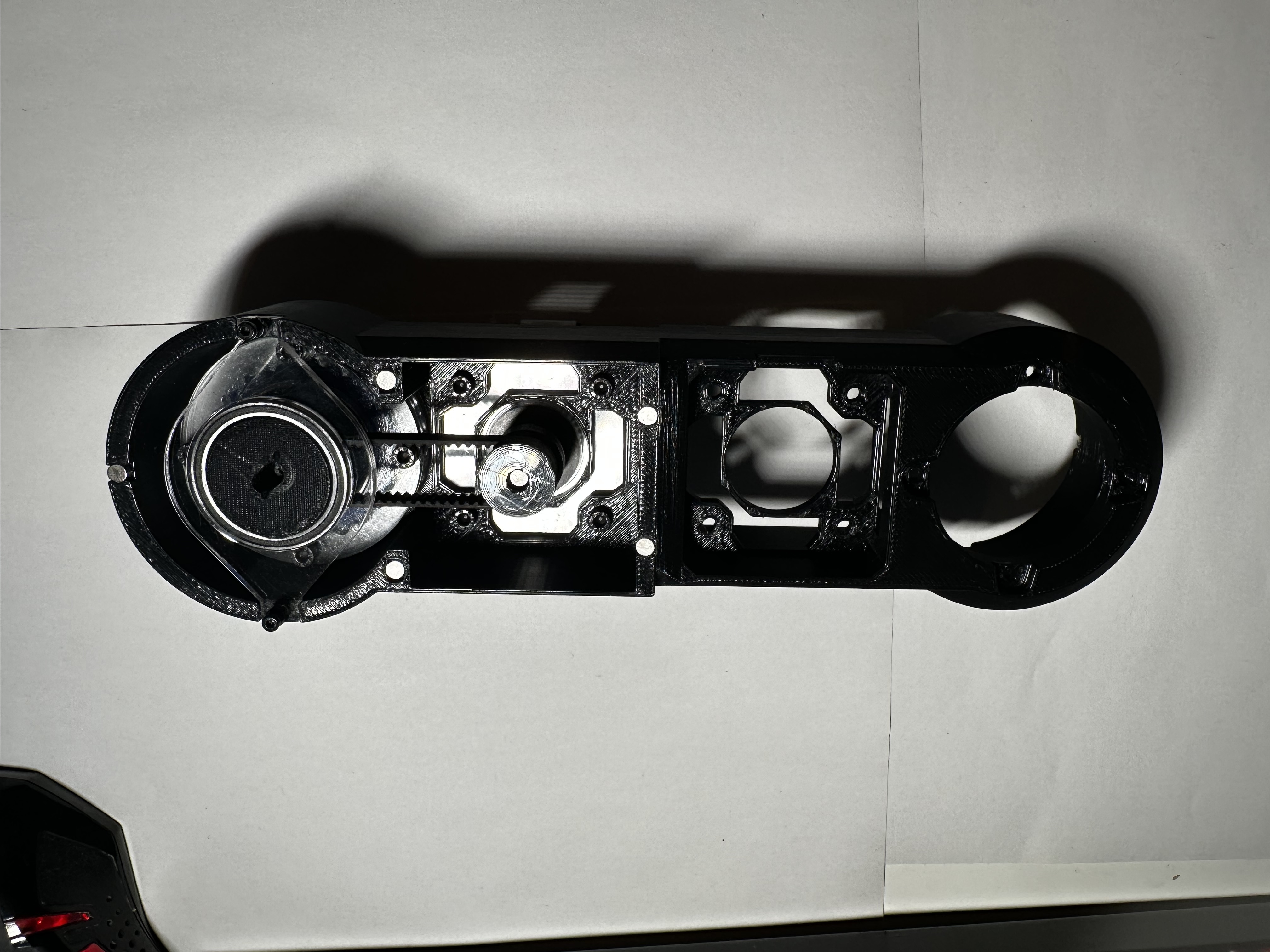
The arm mostly 3-D printed, but it also uses laser cut parts for the cycloidal actuators & covers - those can be 3D printed if laser-cutting is not an option.
It is BY FAR the most time I have spent on any project - we spent hundreds of hours each creating this across a full year of planning, designing, testing, evaluating, failing, replanning, and so on.
If you have any questions, PLEASE feel free to contact me at nikhilvijay.engineering@gmail.com
As you wait for the open-source documentation to go live, below is a compilation of my arm, and the cycloidal generator & actuators that I made.